
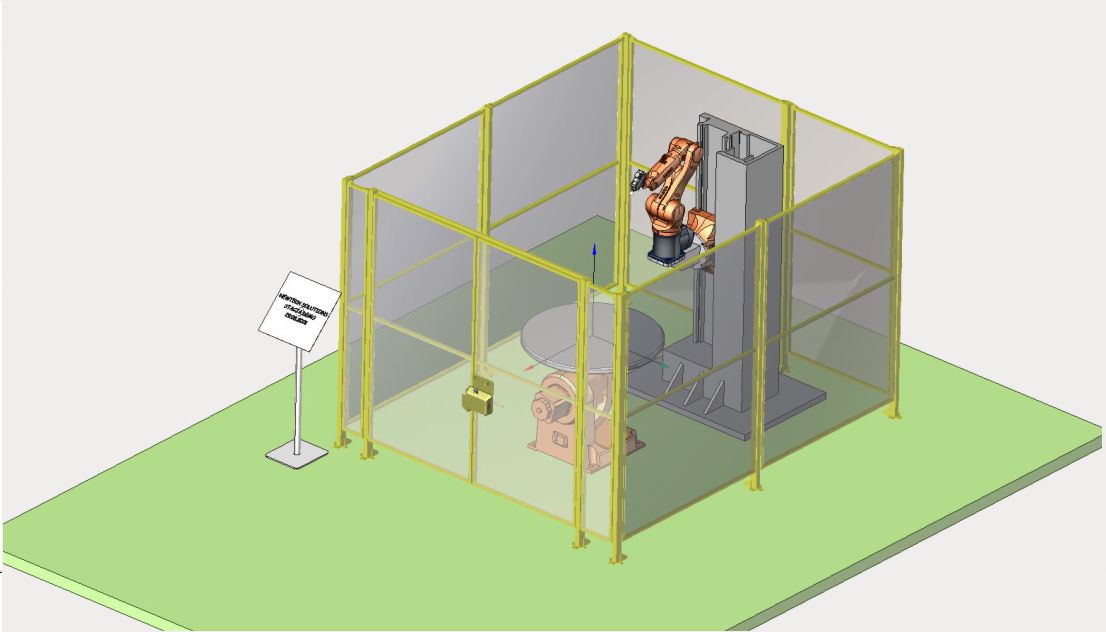
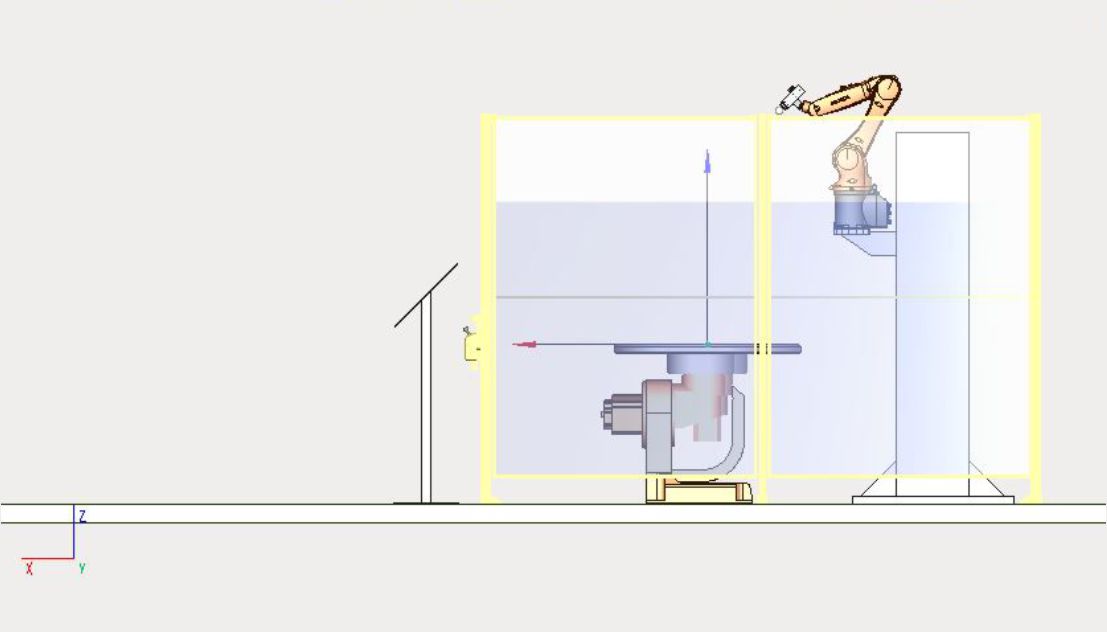


Wydajne rozwiązanie do programowania robotów przemysłowych umożliwiające szybkie tworzenie złożonych, bezkolizyjnych ruchów w natywnym języku robota. SprutCAM Robot umożliwia tworzenie i weryfikację programów sterujących bez konieczności posiadania dostępu do programowanego robota. Wysoka skalowalność celi i dowolna konfiguracja, pozawala na wdrożenie każdego stanowiska z dowolną kinematyką i nietypowymi konfiguracjami takimi jak roboty ze stołami obrotowymi, jednostkami liniowymi i innymi urządzeniami zewnętrznymi.
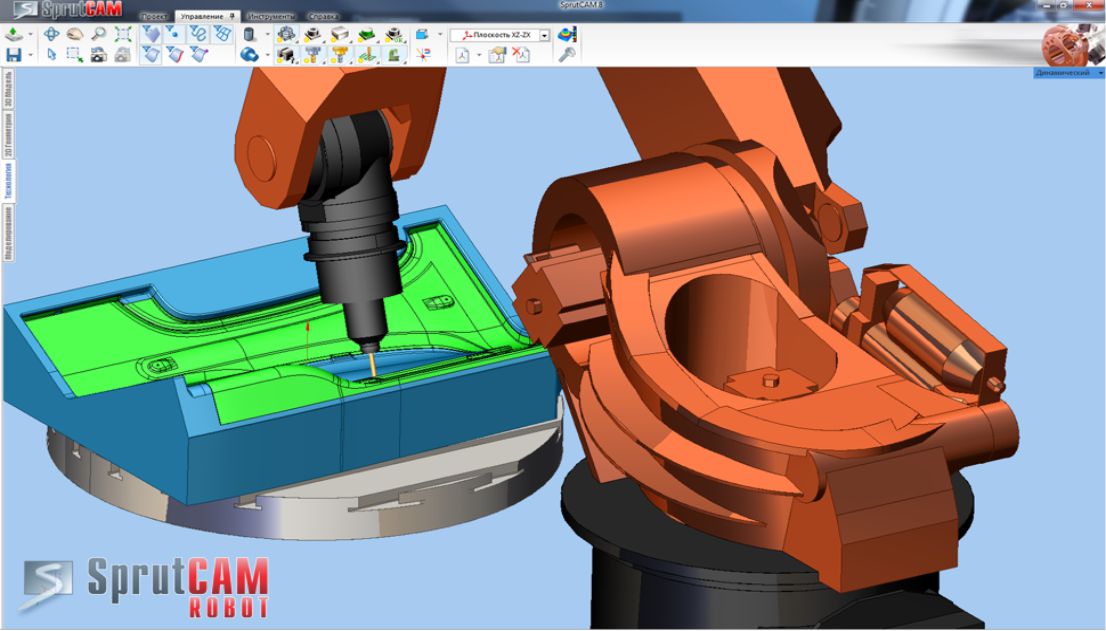
SprutCAM Robot to rozwiązanie pozwalające na efektywne wykorzystanie robotów przemysłowych Fanuc, Kuka, Staubli, Yaskawa Motoman, Toshiba, Mitsubishi, Nachi oraz ABB w obszarach obróbki, gdzie tradycyjnie stosuje się drogie maszyny 5-osiowe.
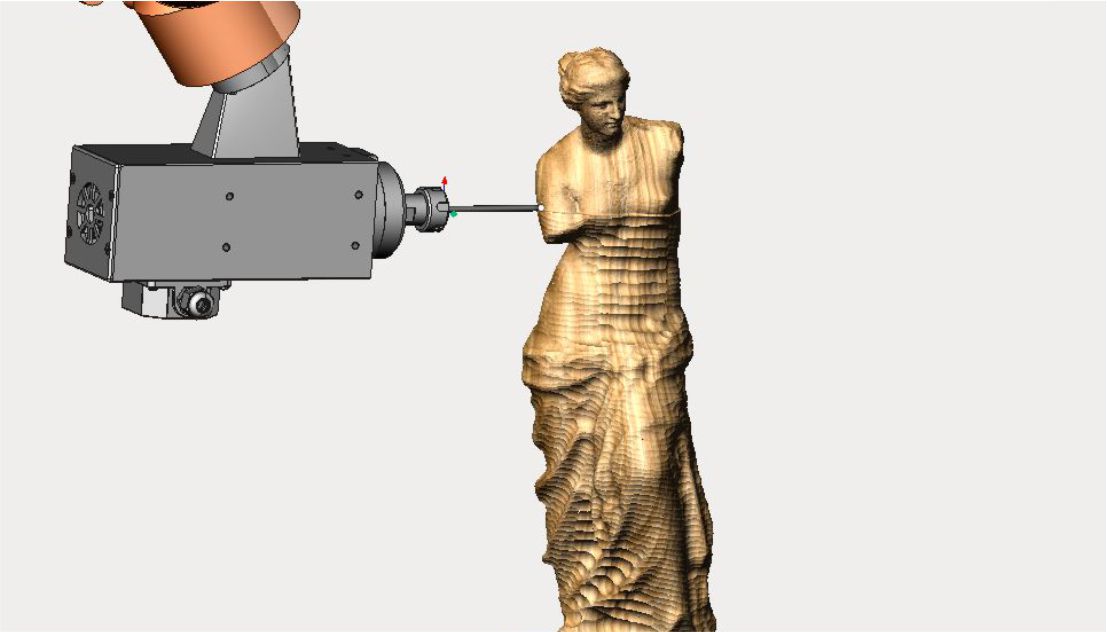
Ścieżki narzędzia dla obróbki 3D dla robotów przemysłowych są generowane za pomocą tych samych strategii obróbczych stosowanych dla tradycyjnych maszyn numerycznych z uwzględnieniem specyficznej kinematyki robota.
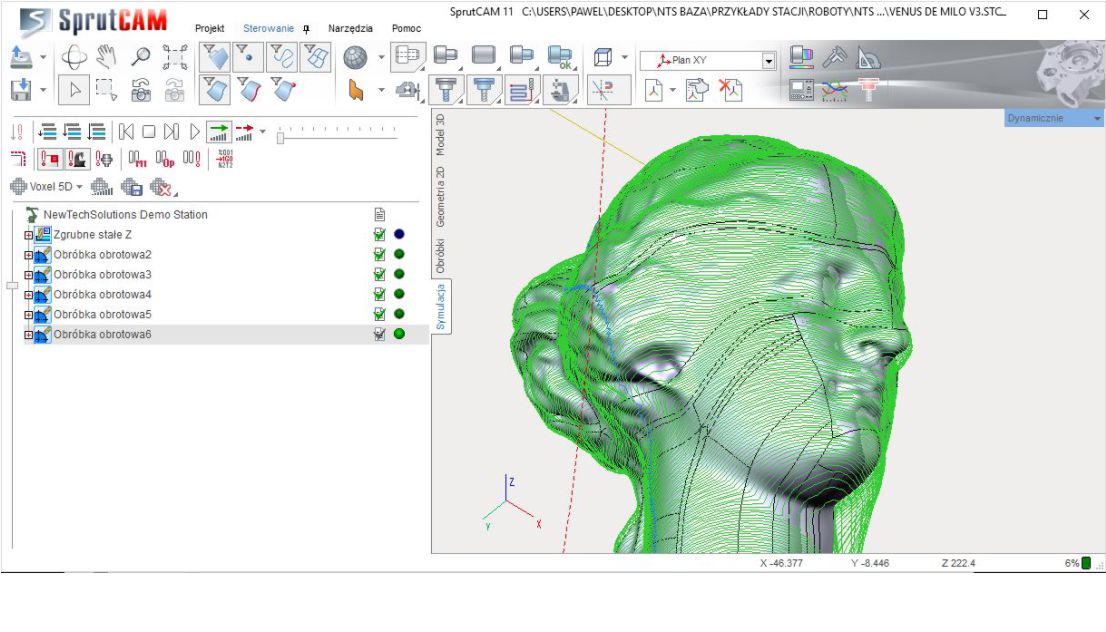
Ścieżki narzędzia do obróbki zgrubnej: równoległa, równoodległa, szybkobieżna, adaptacyjna obróbka zgrubna, płaszczyzna obróbki zgrubnej, obróbka zgrubna obrotowa, obróbka otworów i wiele innych.
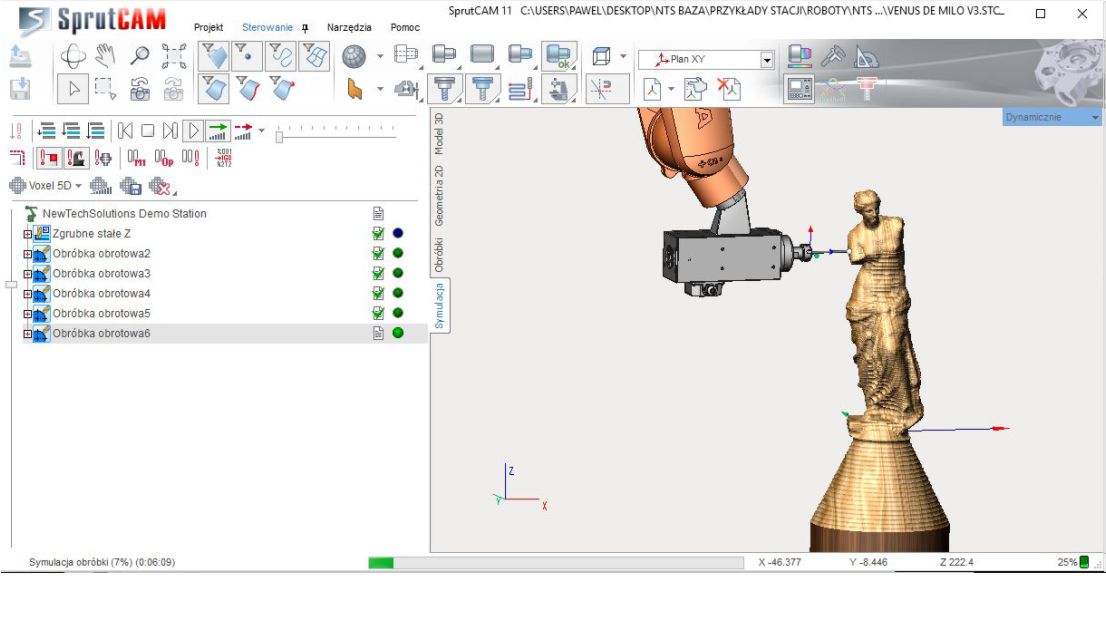
Ścieżki narzędzi wykańczających: wykańczanie linii wodnej, płaszczyzny, półokrągłe (3d stały krok po kroku), przekształcanie, obróbka obrotowa, obróbka 5-osiowa.
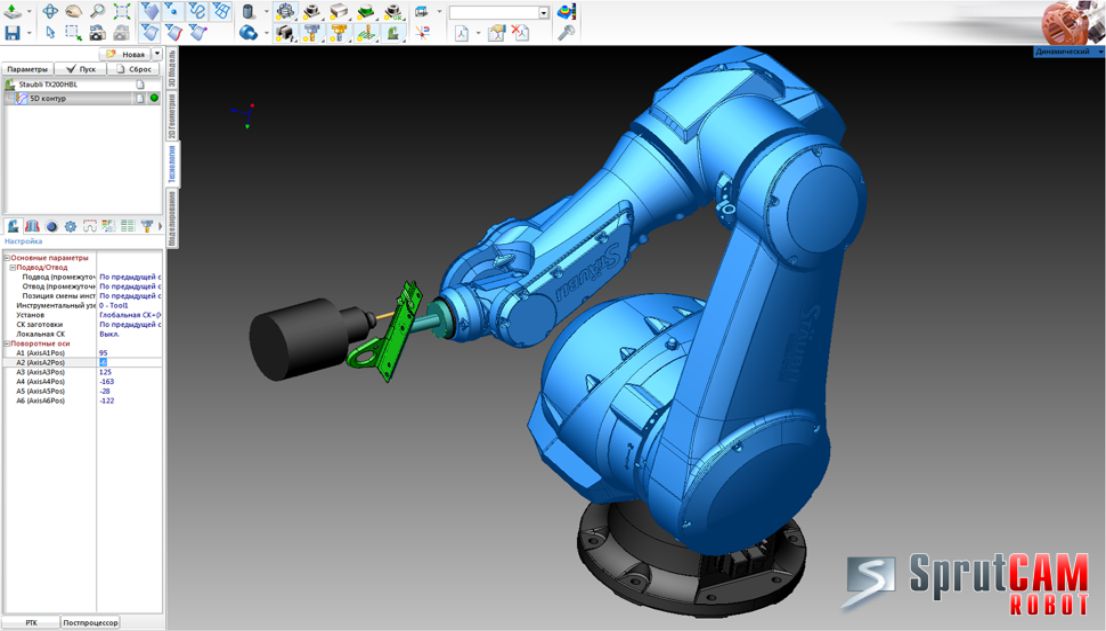
Wszystkie ścieżki narzędzia są generowane z uwzględnieniem specyficznej kinematyki robota. Dodatkową szóstą i inne stopnie swobody robota można zoptymalizować automatycznie lub ręcznie w celu rozszerzenia strefy zasięgu, uniknięcia kolizji lub poprawy warunków obróbki.
Pełne odwzorowanie warunków roboczych maszyny zapewnia realistyczne wyniki symulacji. Dzięki pełnemu opomiarowaniu elementów celi nie bazujemy na przybliżonych pozycjach, a na wartościach rzeczywistych pozycji robota i kinematyki zewnętrznej.
Postprocesor jest elementem odpowiedzialnym za tłumaczenie na język natywny robota w procesie generowania kodu wynikowego. Postprocesor jest unikalny, tworzony pod sterowanie robota i występujące urządzenia peryferyjne z uwzględnieniem specyfikacji procesu.
Aplikacje SprutCAM Robot obejmują:
Sprawdź czy Twój model występuje w przykładowej bibliotece SprutCAM i przetestuj program na własnym robocie. Jesteś w fazie testów, a nie widzisz swojego modelu robota w bibliotece testowej?
Skontaktuj się z Nami!
Od lat tworzymy postprocesory dla różnych maszyn, dzięki czemu jesteśmy w stanie generować kody dla nietypowych sterowań, gdzie składnia kodu jest unikalna.
Skorzystaj z możliwości uruchomienia aplikacji na 30-dniowy okres próbny. Firmy korzystające z wersji próbnej mają możliwości skorzystania ze wsparcia technicznego.